A technical look at what separates high-pole permanent magnet torque motors from one another, and why the architecture decisions made at the design stage matter more than the nameplate.
I've had this conversation more times than I can count. A plant engineer calls, frustrated. They made the move to direct drive — got rid of the gearbox, sold the whole thing internally as a maintenance reduction play — and six months in, they're still not happy with the process. Speed drifts at the low end. The torque curve doesn't match what they expected at partial load. The line is cleaner, sure, but the product consistency they were chasing isn't there.
The mistake isn't that they went direct drive. That decision was sound. The mistake was assuming all direct drive torque motors are roughly equivalent and that the main tradeoffs were price and frame size.
They're not.
The Direct Drive Promise — And Where It Gets Complicated
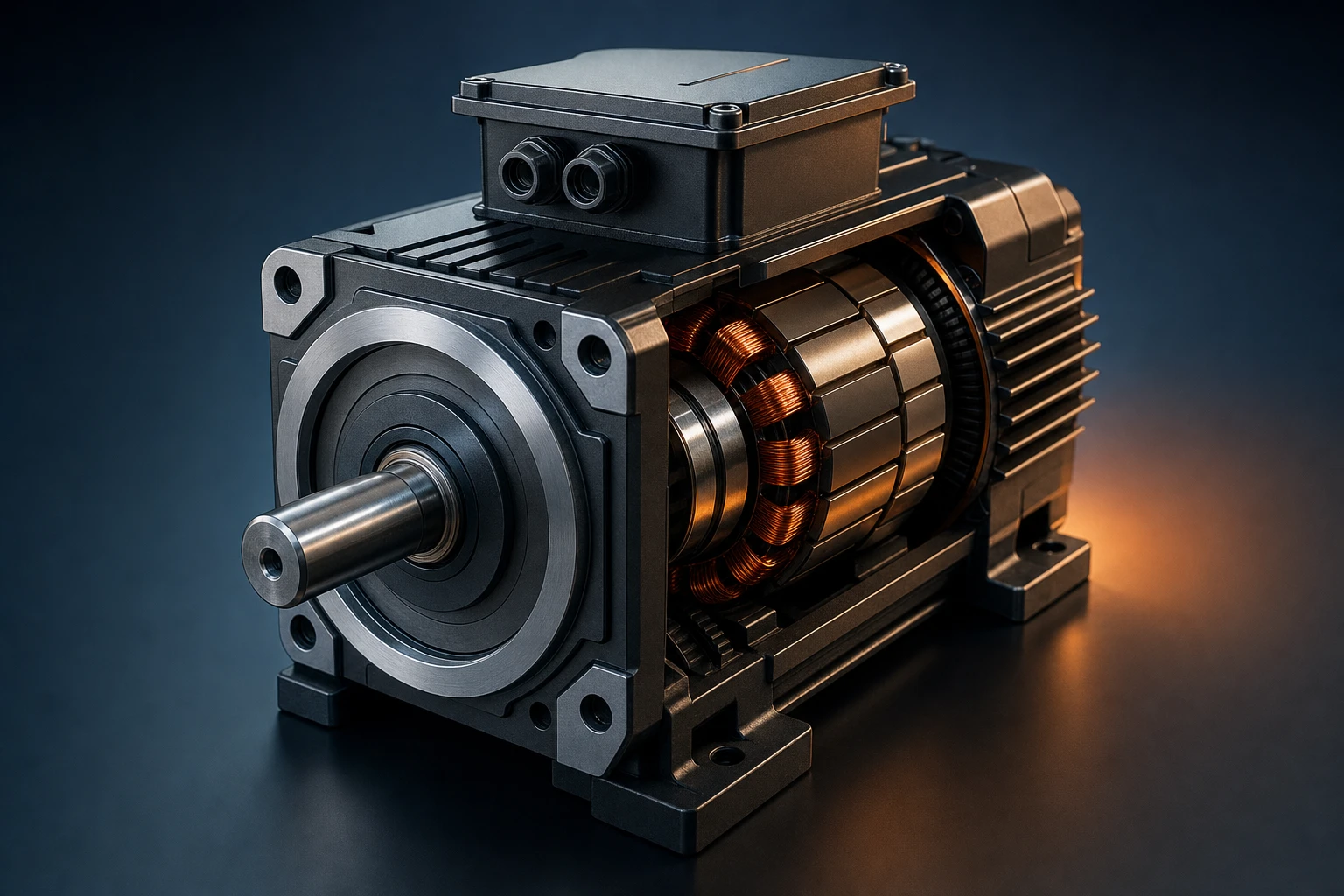
The fundamental appeal of a direct drive permanent magnet motor is simple: you eliminate the mechanical transmission, and in doing so, you eliminate the losses, the maintenance burden, and the mechanical compliance that comes with it. The motor shaft becomes the process shaft. What the drive commands is what the load sees, with very little in between to absorb or distort the signal.
That principle holds across all direct drive torque motors. What differs — significantly — is how well different designs execute on it, particularly in the conditions that actually stress a drive system: very low speeds, partial loads, thermally demanding environments, and applications where process stability isn't just desirable but critical to product quality.
There are two broad design philosophies worth understanding here, and they reflect genuinely different engineering priorities.
Cooling Strategy: Where the Philosophies Diverge Early
The first major split between direct drive torque motor designs is thermal management — specifically, whether the motor requires active water cooling to deliver its rated performance.
Water-cooled torque motors can achieve impressive peak torque figures. The cooling jacket allows the motor to run hotter windings without thermal damage, which in turn allows higher current density and higher torque from a given frame size. On paper, this looks like a straightforward performance advantage.
In practice, it introduces a system dependency that plants often underestimate at the specification stage. Water cooling means a cooling circuit: a pump, a heat exchanger, inlet and outlet plumbing, flow rate monitoring, and the maintenance tasks that come with all of it. In food, pharmaceutical, or clean-room-adjacent applications, it also introduces contamination risk. In facilities where plant water quality is inconsistent, it introduces scale buildup and corrosion as long-term concerns.
Perhaps more importantly, water-cooled motors typically specify a derating factor when operated without cooling — meaning their performance envelope shrinks significantly if the cooling circuit goes down or is unavailable at commissioning. In a real production environment, that dependency creates a vulnerability.
The alternative design philosophy is to engineer the motor for natural convection cooling — no water jacket, no external cooling circuit. This places more stringent demands on the motor's electromagnetic design: winding losses have to be low enough that the motor can dissipate heat passively under continuous duty. Achieving this while maintaining meaningful torque density requires a fundamentally different approach to pole count, winding geometry, and rotor design.
The motors that have gotten this right can run in continuous S1 duty without any cooling infrastructure. They're simpler to commission, simpler to maintain, and genuinely suitable for environments where water cooling is impractical or prohibited.
Pole Count and What It Actually Changes
Most engineers are familiar with the general relationship between pole count and motor speed — more poles, lower synchronous speed at a given frequency. But in high-performance torque motor applications, pole count has implications that go beyond that basic relationship.
A motor with a high pole count — and in this class of motors, we're talking about designs well above what you'd find in a conventional AC induction motor — produces torque in a fundamentally different way. The electromagnetic commutation happens more frequently per revolution, which means the torque output is smoother and more consistent across the shaft angle. Cogging torque, which is the periodic reluctance-based torque variation that causes the characteristic "notchy" feel in some PM motors, is reduced. The motor behaves more like a continuous torque source and less like a rotating pulsed actuator.
This matters enormously in certain applications. Extrusion at very low screw speeds. Mixing where batch consistency depends on maintaining a precise shear rate. Ceramic glaze operations where any periodic torque variation shows up directly in the finished surface. These are applications where the difference between a motor with moderate pole count and one with a significantly higher pole count is not subtle — it's visible in the product.
There's also a control dynamics benefit. A wider frequency range — which naturally follows from higher pole count — gives the drive system more resolution when the control loop is operating at low commanded speeds. Speed regulation at a small fraction of rated RPM is qualitatively different when the motor has more poles working for it.
Voltage Flexibility in the Real World
Here's a practical issue that comes up more often than it should in U.S. industrial installations: voltage standardization.
Large industrial facilities in the United States are rarely running a single supply voltage everywhere. You'll find 460V in one part of the plant, 230V legacy equipment in another, and 480V at the main bus. When a motor is being specified for retrofit or replacement, voltage compatibility can drive the selection in ways that have nothing to do with performance.
Some torque motor designs are wound for a fixed voltage. If the application voltage doesn't match, you're looking at a transformer, a drive with a wider input range, or a re-specification. In retrofit situations, this can add cost and complexity that wasn't anticipated.
Other motor designs are wound to operate at two voltages natively — typically through a winding configuration change — without requiring an external transformer or a drive input adjustment. For facilities managing mixed voltage environments, or for OEMs building machines that will be shipped to customers with varying supply configurations, this is a meaningful differentiator. It reduces SKU complexity and simplifies the specification process considerably.
What Happens at Low Speed — The Real Differentiator
Ask any experienced process engineer what separates a good torque motor installation from a frustrating one, and the answer usually comes back to low-speed behavior.
Rated-condition performance is almost never the problem. Every motor in this class performs reasonably well at or near its design point. The divergence happens when you're at 2% of rated speed trying to hold a consistent screw fill, or when you're ramping through a sensitive portion of a startup sequence and the torque needs to be both accurate and smooth.
Motors that achieve stable operation at very low RPM — fractions of a single revolution per minute — share a few characteristics: high pole count, low cogging torque, tight winding symmetry, and a rotor design that maintains consistent flux distribution at low electrical frequencies. These aren't marketing attributes. They're engineering outcomes that result from design decisions made well upstream of the finished product.
When these characteristics are present, the control system has less compensating work to do. The drive isn't fighting mechanical irregularity; it's simply executing the command. Operators describe the difference as the machine feeling "planted" at low speed rather than hunting.
When they're absent — even in a direct drive system that looks correct on the spec sheet — the result is a motor that requires aggressive control tuning to mask its mechanical limitations, and a process that remains sensitive to disturbances in ways that shouldn't be necessary.
Frame Size Range and Application Fit
One sometimes-overlooked dimension of torque motor selection is the range of frame sizes available within a product family.
A motor line that spans a wide range of frame sizes — from compact units suitable for small mixers or HVLS fans up through large-frame units for high-tonnage extrusion or industrial mixer drives — allows an engineering team to use a consistent motor architecture, control platform, and spare parts strategy across a broad range of machine types.
A motor line concentrated in large frame sizes only solves one class of problems. If your facility runs a mix of machine sizes, you end up managing multiple motor platforms, multiple control strategies, and multiple spare parts inventories. That's a hidden cost that compounds over time.
The Cooling Infrastructure Question: A Total Cost Argument
If there's one message worth taking from this entire discussion, it's this: when evaluating direct drive torque motors, the motor purchase price is not the system cost.
A water-cooled motor requires a cooling system. In a new installation, that cooling system has to be designed, procured, installed, and commissioned. It has an ongoing energy cost (the pump runs continuously). It has a maintenance schedule. It has failure modes — a pump seal failure, a blocked heat exchanger, a fitting that develops a slow drip over a holiday weekend.
A naturally-cooled motor has none of those ancillary costs. The delta between the two, calculated honestly over a five- or ten-year operating period, is frequently large enough to change the selection conclusion even when the motor purchase prices favor the water-cooled option.
This is the kind of analysis that gets skipped in a competitive bid process focused on line-item pricing. It's also the kind of analysis that experienced engineers wish they'd done more carefully the first time around.
What the Spec Sheet Doesn't Tell You
The specification sheet for a direct drive torque motor will give you rated torque, rated speed, protection class, and a voltage rating. It will not tell you how the motor behaves at 0.5 RPM. It won't tell you whether the cooling strategy is realistic for your facility's infrastructure. It won't tell you whether the winding configuration supports your supply voltage without a transformer. And it won't tell you whether the product family scales to cover your other machines or leaves you managing multiple motor platforms.
Those are the questions worth asking before the order is placed.
Direct drive was the right move. Getting the architecture of the direct drive system right — thermal management, pole design, voltage flexibility, low-speed performance — is the move that determines whether the investment delivers what was expected.
The motor that's still running cleanly eighteen months after installation, in the middle of a demanding production run, without anyone having touched it since commissioning — that's the one that got the architecture right.
This article reflects general technical observations on permanent magnet torque motor design and is intended for informational purposes for engineers and technical decision-makers evaluating direct drive systems.